RoboCup Rescue 2015 – Rescue Simulation League Team Description S.O.S (Iran)
前言
这是我过去一年一直在准备并参与的一个比赛RoboCup Recuse Similation League。虽然现在比赛已经结束,但还是抽出时间整理了下以前的东西。为了下届学弟学妹们,也翻译了些许文章。而这一片是描述我们在世界级别比赛上的最大的对手,世界冠军S.O.S。这是原文链接。以下便开始翻译内容。
目录
- 摘要
- 介绍
- Agent
摘要:
SOS团队是众所周知的,在救援仿真联赛中表现出色。我们已经在这个比赛中取得了很多的奖项。去年,我们在巴西举行的机器人世界杯获得第一名。我们团队已经发展了多年,主要是老成员,这些年在不同的比赛中我们的基本代码的得分非常稳定,本文旨在提高老战略和解决新出现的逻辑错误和增加新的功能。
1.介绍
该S.O.S.基础AT的能力和技能,在往年的TDP(2010- 2014年)进行了说明,因此本文所要描绘的是我们的计划,就2015年机器人世界杯新战略的细节改进进行介绍。
去年SOS成员开发全速和低速通信,但到2015年机器人世界杯大赛SOS的主要重点是没有沟通的地图,这种方式专门为消防官兵和警察部队AT创造。在自然灾害中所有类型的事件会发生。正因为如此,在最困难的情况下,我们将执行这么多的活动,来操纵我们的代码。
2 agent
2.1 警察
我们去年的TDP没有讨论被添加到Policeforce代码的新功能。因此,在今年的TDP,我们注重描写警察的算法和方法。
2.1.1 清理系统
改变在2013年模拟服务器中大量的AT卡在地图上的陡峭的边缘问题。定义此问题时必须指出的是,当AT是停留在一个凹区域,其他代理将包围它并引起排斥力卡AT。其结果是,大量的时间将在释放该AT的过程中被浪费。
清理时与街道不具有相同的方向原因。道路有在关节角的方向之间的陡峭的角度,这将导致在凹形区域中的间隙的棱角产生影响。简单和基本的解决办法是清除整条道路,但我们已经避免了,因为这会浪费大量的周期。
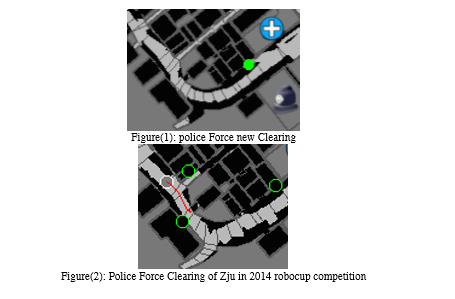
该SOS警方已经设计和开发新的系统和算法,将减小卡在边缘AT的概率。清除时,我们的算法考虑到所有的未来路径,然后选择最佳路径(基于接下来的步骤),同时考虑所有选项(而不是选择和清除的道路的主要方向),这将导致降低卡在陡峭的边缘可能性。图(1)图(2),我们可以比较SOS新的结算方法,由浙江大学队结算。
2.1.2 消防队到达火区
一个在警察部队的其他变动是增加了中断状态,用于帮助消防队处理火灾。如果一个警察看到或感知火灾发生后,AT开始估计火灾的大小。如果猜测,火灾是相当小的尺寸,警方会放弃自己的任务,首先释放消防大队AT和火之间的路径,所以大火将更快熄灭。
2.1.3 检查火灾的概率状态
加入警队的另一个特点是检查火灾概率状态。在这种状态下,如果警方检测一些建筑物的高温,AT开始估计火灾可能发生。如果发生火灾的地区是AT附近,AT将清除道路,所以可以阻止火灾发生。
2.1.4 无通讯世界模型
我们的警察部队也更新与消防队的通讯,这是在没有通信战略的世界模型下。在没有沟通的策略下,如果AT检测火的集群,遵循火找到它的边界。但是,什么是比找到火并通知火的新信息消防大队代理更重要。警方代理发现消防大队的负责灭火,并更新了消防的信息。由于没有沟通,根据他们的旧世界模式不明,为消防队的最有可能的地方,警方搜查了代理商的确切位置。然后警察代理更新世界模型的每个消防队的信息,如果火剂的最后一次更新的时间超过15个周期。
RoboCup Rescue 2015 – Rescue Simulation League Team Description S.O.S (Iran)
http://example.com/2022/07/24/2016-01-19-Rescue-Simulation-League-Team-Description-S.O.S-(Iran)/
install_url to use ShareThis. Please set it in _config.yml.